Configuration¶
mag-usb reads an optional config.toml at startup. It searches for the configuration file in the following order:
/etc/mag-usb/config.tomlconfig.tomlin the current working directory.
If neither file is found, defaults are used. Invalid values are ignored or reduced to defaults. Command-line arguments always override both default values and those found in any configuration file.
Tip: Run ./mag-usb -P to print the active settings and exit.
File format¶
Syntax: TOML (key = value). Lines beginning with
#are comments.Sections use
[section_name]headers.
Sections and keys¶
Below is the complete reference of supported sections/keys, their types, defaults, and notes.
[node_information]¶
maintainer(string)maintainer_email(string)
Defaults: empty strings.
[node_location]¶
latitude(string) — free‑form (e.g., “38.92263”).longitude(string)elevation(string) — free‑form (e.g., “230 m”).grid_square(string) — e.g., “EM38uw”.
Defaults: empty strings.
[i2c]¶
use_I2C_converter(bool) — Use Pololu USB‑to‑I²C adapter. Default: true (when built with USE_POLOLU=TRUE).portpath(string) — Adapter device path. Default:/dev/ttyMAG0(created byinstall/99-PololuI2C.rules; falls through to a bare/dev/ttyACM*if the udev rule is not installed and-Ois not supplied).bus_number(int) — Linux I²C bus number for non‑Pololu setups. Default: 1.scan_bus(bool) — Probe for devices on startup. Default: false.
Notes:
If
use_I2C_converter=true,portpathmust be accessible to the process (see udev notes in Hardware‑Setup.md).
[magnetometer]¶
address(int, decimal or hex0xNN) — RM3100 I²C address. Default: build‑time default fromRM3100_I2C_ADDRESS.cc_x,cc_y,cc_z(int) — Cycle counts. Typical values: 200, 400. Default: 400 (if set in config.toml).gain_x,gain_y,gain_z(double) — Gains. Default: 150.0.tmrc_rate(int, decimal or hex) — TMRC register value. Default: 0x96.nos_reg_value(int) — Number‑of‑samples register value. Default: 60.drdy_delay(int) — Sleep between DRDY-poll iterations in milliseconds. Default: 10. (The implementation passesdrdy_delay * 1000tousleep(), which takes microseconds; the configured value is therefore anmscount, not aµscount.)sampling_mode(string) —"POLL"or"CMM". Default:"POLL".cmm_sample_rate(int) — CMM sample rate (Hz). Default: 400.readback_cc_regs(bool) — Read back CC registers after setting. Default: false.
[mag_orientation]¶
Defines fixed 90°‑increment rotations applied to the measured vector before printing.
mag_translate_x(int) — Allowed values: -180, -90, 0, 90, 180.mag_translate_y(int) — Allowed values: -180, -90, 0, 90, 180.mag_translate_z(int) — Allowed values: -180, -90, 0, 90, 180.
Rules:
Missing/invalid values default to 0.
180and-180are treated equivalently.Rotations are applied in the order X, then Y, then Z, using right‑hand rule conventions.
See Orientation-and-Axes.md for visuals and examples.
[temperature]¶
remote_temp_address(int, decimal or hex) — MCP9808 temperature sensor address. Default: 0x1F.
[output]¶
write_logs(bool) — Write logs to files. Default: false.log_output_path(string) — Path for log files. Default:./logs(when logging enabled).create_log_path_if_empty(bool) — Createlog_output_pathif missing. Default: true.use_pipes(bool) — Use named pipes for IPC. Default: false.pipe_in_path(string) — Path to control pipe (writer side). Default:/run/mag-usb/magctl.fifo.pipe_out_path(string) — Path to data pipe (reader side). Default:/run/mag-usb/magdata.fifo.
Note: When use_pipes=true, the program will create the pipes if they do not exist with 0666 permissions.
[websocket]¶
enable(bool) — Enable the WebSocket output server. Default: false.bind_address(string) — Server bind address. Default:0.0.0.0.port(int) — Server port. Default: 8765. Note: This section is active only when built with-DENABLE_WEBSOCKET=ON.
Example¶
# mag-usb Configuration File
# Lines starting with # are comments.
# Inline comments (Data followed by hashmark) not allowed.
[node_information]
maintainer = "Dave Witten, KD0EAG"
maintainer_email = "wittend@wwrinc.com"
[node_location]
# Tools:
# lat/long: Google Maps or GNSS device.
# Altitude: Optional, or Use GNSS device, or find yourself in Google Earth and look at the status bar at the bottom.
# Grid square conversion: https://www.giangrandi.org/electronics/radio/qthloccalc.shtml or similar.
latitude = "38.92263"
longitude = "-92.29831"
elevation = "230 M"
grid_square = "EM38uw"
[output]
# Write logfiles to log_output_path..
write_logs = false
# create logfiles in this location.
log_output_path = "./logs"
# create this location if it does not esist.
create_log_path_if_empty = true
# Use named pipes for IPC.
use_pipes = false
# Pipe paths (if use_pipes is true).
pipe_in_path = "/run/mag-usb/magctl.fifo"
pipe_out_path = "/run/mag-usb/magdata.fifo"
[websocket]
# Enable WebSocket output server.
enable = false
# Bind address and port for WebSocket clients.
bind_address = "0.0.0.0"
port = 8765
[i2c]
# Use external USB to I2C device.
use_I2C_converter = true
# Path to the I2C device.
portpath = "/dev/ttyMAG0"
# I2C bus number (for non-Pololu setups).
bus_number = 1
# Scan I2C bus on startup.
scan_bus = false
[magnetometer]
# Magnetometer I2C address (hex format supported).
address = 0x23
# Cycle Count registers (200 or 400 typically).
cc_x = 400
cc_y = 400
cc_z = 400
# Gain values.
gain_x = 150.0
# TMRC Rate register value (hex format).
tmrc_rate = 0x96
# Number of samples register value.
nos_reg_value = 60
# DRDY delay in milliseconds (passed to usleep as ms * 1000).
drdy_delay = 10
# Sampling mode: "POLL" or "CMM".
sampling_mode = "POLL"
# CMM sample rate (Hz)
cmm_sample_rate = 400
# Read back cycle count registers after setting.
readback_cc_regs = false
# Magnetometer Orientation in degrees relative to default (See hardware setup docs).
# Plus and minus 180 are equivalent. Plus and minus 90 are different!
[mag_orientation]
# Allowed values: -180, -90, 0, 90, 180
mag_translate_x = 0
mag_translate_y = 0
mag_translate_z = 0
[temperature]
# Remote temperature sensor I2C address
remote_temp_address = 0x1F
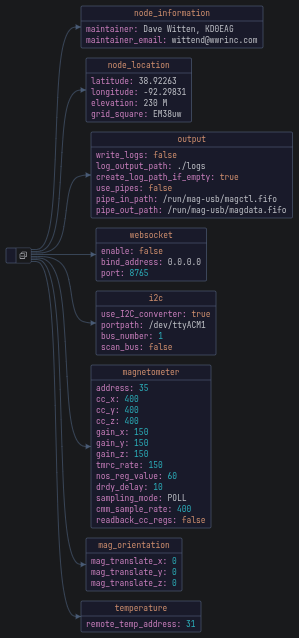 Fig. 3: Sample config.toml file for mag-usb.
Fig. 3: Sample config.toml file for mag-usb.